kalman 滤波器
一直没深入看一下kalman,今天查阅了很多资料,终于找到一个很形象很具体的解说
如何通俗并尽可能详细地解释卡尔曼滤波? - 云羽落的回答 - 知乎
其实解释起来不复杂
-
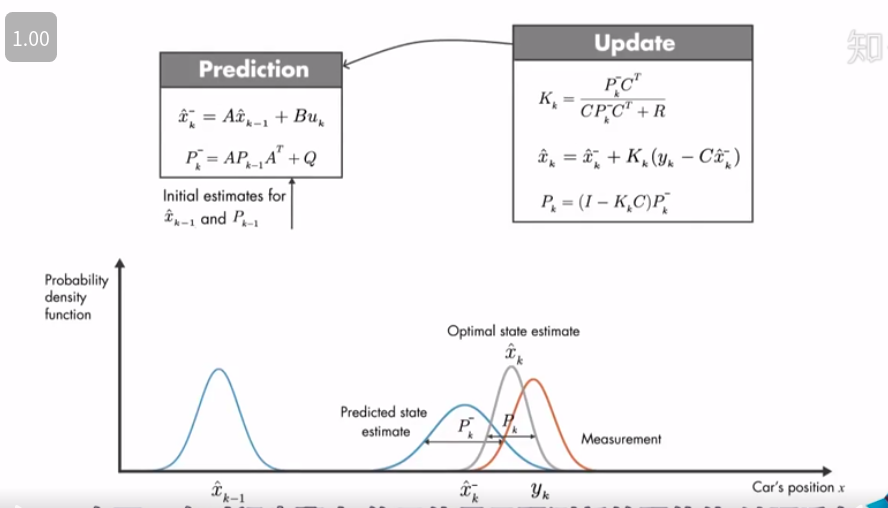
预测变量x, 但是有两个x,怎讲?因为x的真实值我们是永远不知道的,就算温度计测出来的温度也有误差哦。\( y_k \) 测量值,温度计测出来的,\( \hat{x}^{-}_k \) 这是通过数学模型估算出来的值,\( \hat{x}_k \) 就是kalman最优估算值,需要得到的值
-
有两个协方差,和上面对应,一个测量R,一个模型估算\( P^{-}_k \),kalman最优估算值是\( P_k \)。Q对应transition_covariance(pykalman),Q是mean为0,方差为Q的高斯分布,pykalman中的这个参数命名有点问题,这个不是协方差,其实就是P在变化时的一个噪声,应该是variance。而P是描述状态变量间(多维)关系的,初始P为initial_state_covariance(pykalman)。R和P不一样,R和Q功能一样,为observation_covariance(pykalman)。
-
有一个增益K,就是通过两个协方差计算而来,其实简单来讲就是把测量值 和 模型估算值 做一个中和
-
注意:
- 当然,可以用多个传感器来提高精确度
- 普通kalman滤波器只支持线性,而且状态值x要符合高斯分布,貌似只要噪声项为高斯即可,这个再考察一下。
一些参数,图片来源
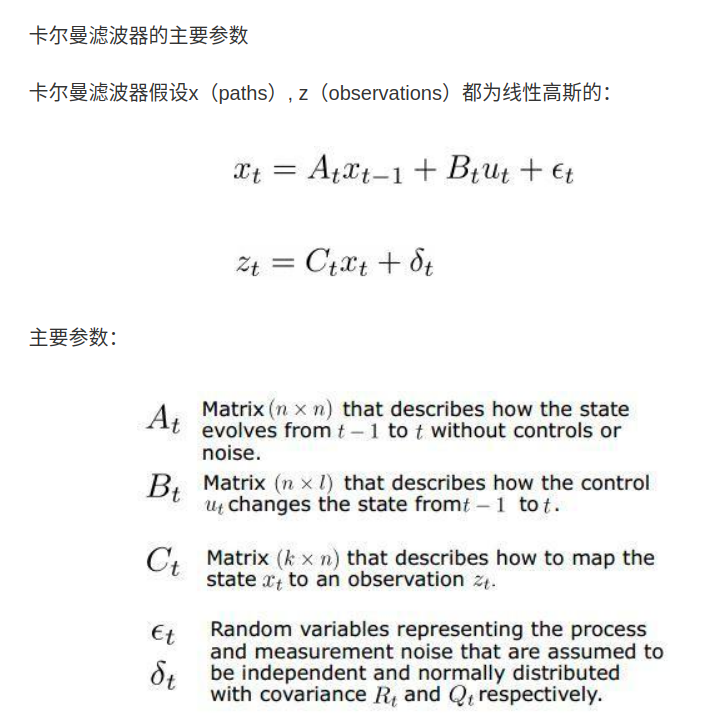
- \( A_t \) 就是 transition_matrices ,状态转移矩阵
- \( B_t \) 是 contral_matrices 控制矩阵
- \( C_t \) 是 状态转移矩阵,从state到observation的线性计算矩阵,observation_matrices
- \( \epsilon_{t} \) 对应上上图的Q,transition_covariance,图中的解释为Rt可能是另外的公式,那么\( \delta_{t} \) 就是对应上上图的R了,observation_covariance,图中的解释为Qt是另外的公式
实例
moving average
这个貌似有点问题,因为价格本身不是高斯分布
Comments
comments powered by Disqus